
In-Vehicle Networking: 20 anni di evoluzione
Joseph Notaro, VP Worldwide Automotive Strategy and Business Development (ON Semiconductor).
Gli odierni veicoli sono sempre più sofisticati e, riandando indietro nel tempo di un paio di decenni, si può affermare che i cambiamenti sono davvero significativi. A quei tempi i veicoli erano essenzialmente mezzi meccanici che ospitavano alcuni sottosistemi idraulici per l'impianto frenante mentre la parte elettronica, relativamente semplice, era limitata ai circuiti di illuminazione, ai sistemi di accensione e alla carica della batteria. Era possibile effettuare un cablaggio per realizzare collegamenti diretti tra i pochi sistemi elettronici presenti e, anche se tali cablaggi erano relativamente complessi, un tale tipo di approccio era sicuramente gestibile.
Anche quando per la prima volta sono stati installati a bordo dei veicoli i primi sistemi audio, le esigenze in termini di cablaggio erano relativamente semplici, in quanto bastava un collegamento all'alimentazione, oltre a semplici connessioni agli altoparlanti e l'antenna. Verso la fine del secolo scorso il contenuto di elettronica a bordo dei veicolo è iniziato ad aumentare in maniera significativa, grazie all'introduzione di dispositivi quali i sensori nelle ruote, un valido ausilio per il controllo della trazione e i sistemi ABS (Anti-Lock Bracking, che evitano il bloccaggio delle ruote in fase di frenata d'emergenza), oltre ai sensori di collisione, elementi fondamentali per il funzionamento degli airbag. Ciò ha comportato l'introduzione di un nuovo modello di riferimento basato sull'utilizzo di centraline elettroniche (ECU Electronic Control Unit) distribuite/satellitari.
La tecnologia è divenuta sempre più pervasiva al trascorrere del tempo e oggigiorno sistemi elettronici estremamente affidabili sono divenuti elementi essenziali per garantire gli elevati standard di sicurezza, efficienza e comfort che caratterizzano le moderne autovetture. Molte delle funzionalità presenti sono destinate ad aiutare il guidatore a mantenere il controllo del veicolo, attraverso l'assistenza attiva finalizzata a gestire la sterzata, la frenatura, la trazione e la coppia. Parecchie funzionalità, tra cui ESP (Electronic Stability Program), EPS (Electric Power Steering), sospensioni attive e ABS rientrano in questa categoria. Anche i sistemi meno critici presenti a bordo di un veicolo, tra cui luci, tergicristalli, chiusura delle portiere, finestrini, tetti apribili e i sempre più sofisticati apparati di infotainment sono gestiti elettronicamente, ciascuno con il proprio modulo di controllo che deve comunicare con gli altri in tutto il veicolo.
Negli ultimi tempi anche nei veicoli di fascia bassa sono stati installati sistemi ADAS (Advanced Driver Assistance System): si tratta di apparati complessi che fanno ricorso a sensori molto sofisticati in grado di espletare numerosi compiti legati alla sicurezza e al comfort.
Le telecamere gestite dal sistema ADAS forniscono utili funzionalità aggiuntive, come ad esempio la visione a 360° che rappresenta un valido ausilio nelle manovre di parcheggio. A questo punto non bisogna dimenticare che alcuni modelli di fascia alta ospitano fino a una decina di telecamere. Al crescere dell'importanza delle telecamere nell'ambito delle funzionalità legate alla sicurezza, aumenta di pari passo la richiesta di livelli di risoluzione sempre più spinti, con il conseguente aumento della quantità di dati che devono essere trasmessi in maniera affidabile, sicura e in tempo reale (ovvero senza alcuna latenza) in tutto il veicolo.
E' evidente che la progressiva diffusione della tecnologia all'interno dei veicoli non sarebbe stata possibile se i costruttori di automobili fossero rimasti “ancorati” all'approccio basato sul cablaggio tradizionale. Essi, al contrario, hanno cercato di individuare metodologie di multiplazione e di networking per migliorare la connettività riducendo nel contempo il numero di connessioni fisiche tra i vari sistemi.
Protocolli IVN (In-Vehicle Networking)
Poiché anche nelle odierne vetture di fascia bassa sono ora installate decine di ECU, sono centinaia, se non addirittura migliaia i segnali che devono essere instradati all'interno di un veicolo. Un cablaggio, con i relativi connettori, in grado di istradare tutti i segnali (sia dati sia potenza) in un veicolo sarebbe così ingombrante, pesante, complesso e costoso da risultare praticamente irrealizzabile. Senza dimenticare che ciascun cablaggio dovrebbe essere realizzato “ad hoc” per ogni singolo modello di una famiglia di veicoli. La connessione in rete all'interno di un veicolo (in-vehicle networking) è la risposta adeguata a queste problematiche, anche se l'utilizzo di un approccio di questo tipo richiede l'esame di alcuni aspetti in fase di progettazione.
I requisiti delle ECU e dei sistemi associati differiscono in modo sensibile in funzione del tipo di dispositivo e della funzione che deve assolvere. Parametri quali velocità e ampiezza di banda, jitter (variazione di una o più caratteristiche di un segnale) ammissibile e tempo di risposta (latenza), oltre ad altri elementi come il livello di ridondanza, differiscono in modo significativo e hanno un impatto sui requisiti di connettività e, in qualche misura, sul protocollo utilizzato per la connessione in rete. Una telecamera frontale che fa parte di un sistema ADAS, per esempio, trasmette continuamente una grande quantità di dati critici, mentre un sensore che fornisce indicazioni circa il livello di carburante trasmette un semplice pacchetto di dati di tanto in tanto.
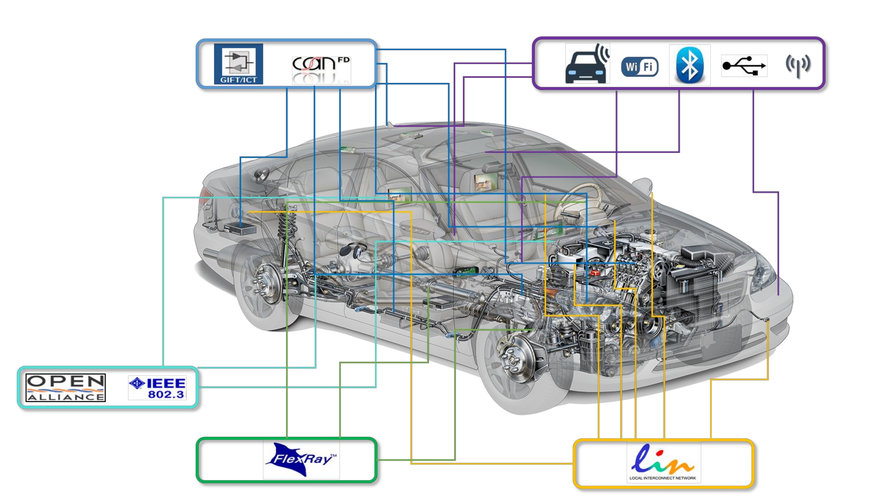
Con il trascorrere del tempo, un certo numero di soluzioni di networking per applicazioni automotive si sono evolute per adeguarsi alla crescita dei requisiti imposti per la trasmissione dati all'interno dei veicoli. Di seguito una rapida sintesi:
- Local interconnect network (LIN): Si tratta di un bus a ridotta ampiezza di banda, caratterizzato da una velocità massima di trasferimento dati 20 kbps, utilizzato principalmente all'interno di sotto-sistemi per i quali costo e semplicità sono gli aspetti critici.
- Controller area network (CAN): Questo standard, sviluppato da Robert Bosch GmbH negli anni '80 e divenuto standard ISO nel 1994, è il tipo di rete IVN più utilizzata, che può contare su centinaia di milioni di nodi implementati ogni anno. Contraddistinta da una velocità massima di trasmissione di 1 Mbps, viene utilizzata prevalentemente per collegare le diverse ECU ai vari sensori presenti su un veicolo. Il bus CAN supporta il multiplexing, consentendo in tal modo la condivisione dei sensori tra una o più ECU. Questo bus utilizza un semplice doppino intrecciato e permette di ridurre il numero di fili richiesto in misura fino al 40% rispetto all'approccio che contempla l'utilizzo dei cablaggi tradizionali.
- Bus di comunicazione FlexRay: per superare le limitazioni in termini di velocità del bus CAN, è stato sviluppato il protocollo FlexRay che garantisce velocità di trasferimento dati fino a 10 Mbps in applicazioni quali ad esempio “drive-by-wire” e “steer-by-wire” (con questi termini si indica in generale la sostituzione dei tradizionali sistemi di controllo meccanici con controlli elettronici). Il protocollo FlexRay è inoltre in grado di supportare più topologie di rete.
- Media oriented systems transport (MOST): si tratta di uno standard proprietario sviluppato per la trasmissione di segnali audio, video, vocali e dati in grado di raggiungere una velocità di 50 Mbps.
Questi protocolli hanno continuato ad evolvere per soddisfare le esigenze, sempre più impegnative e in perenne cambiamento, dei moderni veicoli. Robert Bosch, ad esempio, nel 2012 ha presentato una nuova versione del bus CAN durante la International CAN Conference in 2012. Questa nuova versione, nota come CAN FD, abbina le caratteristiche principali del bus CAN originale con il supporto di velocità di trasferimento dati più elevate e di carico utile (data payloads, ovvero quella porzione di dati che costituisce il messaggio vero e proprio) di maggiori dimensioni.
Segmentazione all'interno di una rete IVN
Per quanto concerne la latenza di rete e la rapidità di risposta, i differenti sotto-sistemi presenti in un veicolo avranno esigenze diverse. Ciò ovviamente influenzerà la scelta del protocollo IVN utilizzato. E' evidente che un segnale relativo a un comando di “steer-by-wire” assumerà un'importanza maggiore rispetto a una richiesta di cambiamento del canale radio ed è proprio per tale motivo che la rete deve essere configurata in maniera appropriata.
Molto spesso un veicolo è suddiviso in vari domini che raggruppano differenti caratteristiche, funzionalità e requisiti. Per ragioni legate alla sicurezza, alle emissioni e al rispetto delle normative due domini – il powertrain (ovvero il gruppo propulsore che controlla motore e trasmissione) e lo chassis (preposto al controllo delle sospensioni, della sterzata e della frenatura) hanno requisiti di risposta di tipo “hard real time” (in altre parole non devono mai venire violati i vincoli di correttezza logica e di correttezza temporale). Il controllo del motore è di fondamentale importanza per il controllo delle sostanze inquinanti, in special modo il particolato, oltre che per assicurare il mantenimento dell'efficienza energetica ai più elevati livelli possibili. Un controllo di questo tipo richiede un campionamento in tempi brevi dei dati provenienti dai sensori (dell'ordine dei millisecondi) e la disponibilità di microcontrollori con prestazioni sufficientemente elevate, oltre alla necessità di scambiare frequentemente dati con altri domini.
Il dominio dello chassis, dal canto suo, riveste un ruolo critico in termini di sicurezza in quanto controlla la stabilità, il sistema ABS e, sempre più spesso, la funzionalità steer-by-wire. Per quel che concerne i dati, i requisiti sono simili a quelli previsti per il dominio del powertrain, sebbene gli aspetti relativi alla sicurezza introducano requisiti che possono essere soddisfatti in misura ottimale utilizzando tecniche di connessione in rete di tipo deterministico o time-triggered (in questo caso le comunicazioni avvengono su precisa base temporale e in accordo a uno schema condiviso e riconosciuto tra tutti i nodi della rete). All'interno del dominio della carrozzeria sono raggruppate numerose funzioni tra cui luci, finestrini, portiere, controllo della climatizzazione, tergicristalli e altri ancora. Tutti questi elementi solitamente si scambiano tra loro pacchetti di informazioni di dimensioni relativamente ridotte, principalmente in risposta ai comandi degli occupanti del veicolo.
Telematica e sistemi di infotainment, che rivestono un ruolo sempre più significativo della comunicazione all'interno di un veicolo, fanno riferimento a sistemi di navigazione, telefoni a mani libere, sistemi audio e diagnostica remota. In questo dominio l'elemento fondamentale non sono i messaggi sensibili al fattore tempo (time sensitive), bensì i flussi di dati multimediali per i quali l'integrità dei segnali e la privacy dei dati rivestono un'importanza critica. Nel momento in cui i veicoli diventano sempre più connessi tra di loro e con il mondo circostante, i fattori destinati ad assumere una sempre maggiore rilevanza saranno le comunicazioni wireless e le problematiche concernenti la sicurezza delle comunicazioni stesse.
Mentre gruppo propulsore, lo chassis, la carrozzeria e la telematica sono senza dubbio i quattro domini principali, l'aumento delle funzionalità relative alla sicurezza come sensori di impatto, dispiegamento degli airbag, avvertimenti di superamento della corsia, controllo della velocità di crociera di tipo adattativo (ACC – Adaptive Cruise Control) e monitoraggio dello stato del guidatore stanno portando alla definizione di un ulteriore dominio, che ora viene comunemente definito come “sicurezza attiva e passiva”.
Il futuro delle reti IVN
La rapidità dello sviluppo e l'aggiunta di sempre nuove funzionalità nei veicoli sta mettendo a dura prova le capacità di molti dei protocolli esistenti. I produttori di automobili stanno ora rivolgendo la loro attenzione al mondo all'industria elettronica per cercare di identificare quei protocolli che saranno in grado di gestire le attuali e future evoluzioni tecnologiche del mondo automotive.
Nel momento in cui aumenta la complessità dei veicoli e le comunicazioni con altri veicoli e con le infrastrutture circostanti, come quelle presenti nelle “smart cities”, stanno diventando una prassi comune, l'architettura dei veicolo dovrà necessariamente evolvere. In tale contesto è verosimile che Ethernet sia destinata a diventare la tecnologia di rete IVN dominante, semplificando il passaggio dalle comunicazioni basate sui segnali alle architetture orientate ai servizi.
Ethernet è spesso indicata come il candidato più probabile per le reti IVN del futuro, in quando permette di adottare un singolo standard per il collegamento in rete di tutto il veicolo. L'utilizzo di Ethernet comporterebbe un certo numero di vantaggi, non ultimo il fatto che si tratta di uno standard ampiamente diffuso e collaudato, per il quale sono disponibili tutti i componenti necessari, con gli annessi benefici in termini di economie di scala. La larghezza di banda disponibile è dell'ordine del gigabit, con proiezioni di arrivare a raggiungere i 10 Gbps in tempi brevi.
Un possibile problema legato all'adozione di Ethernet per l'implementazione di reti IVN è rappresentato dalla latenza, che lo rende meno adatto per l'uso in applicazioni “safety-critical”. I nuovi sviluppi in corso, come 10-BASE-T1S, uno standard “collision-free” che prevede velocità di 10 Mbps su un singolo doppino intrecciato con arbitrazione integrata per l'accesso ai nodi, rappresentano l'evoluzione futura della tecnologia IVN.
Richiedi maggiori informazioni…
