
www.industria-online.com
12
'10
Written on Modified on
Grazie a MapleSim è stato sviluppato rapidamente un modello multidominio ad alta fedeltà di un rover robotico spaziale
Molte agenzie di ricerca spaziale in tutto il mondo puntano ad esplorazioni planetarie senza presenza dell’uomo. Per poterlo fare con successo, sono necessari rover robotici autonomi avanzati. Il Dr. Amir Khajepour, titolare di una Cattedra di Ricerca Canadese sui Sistemi Veicolari Meccatronici e Professore di Ingegneria presso il Dipartimento di Ingegneria Meccanica e Meccatronica dell’Università di Waterloo (UW), sta collaborando con la Canadian Space Agency (CSA), Maplesoft e il Governo del Canada al fine di sviluppare una soluzione completa per il sistema di gestione dell’energia di rover autonomi. Con MapleSim, la base del modello matematico del rover a 6 ruote è stata sviluppata in un solo mese, senza scrivere una sola equazione.
Il CSA ha una forte esperienza nell’applicazione di tecniche simboliche alla modellazione di robotica spaziale. Tali tecniche sono state utilizzate nella progettazione di vari robot spaziali implementati nell’ambito del programma Space Shuttle e della Stazione Spaziale Internazionale. Questa nuova iniziativa presso l’UW utilizza MapleSim, l’ultima generazione di tecnologia di modellazione simbolica, per sviluppare rapidamente modelli multidominio ad alta fedeltà dei sottosistemi di un rover.
L’obiettivo generale del progetto è progettare un sistema rover in grado di portare il rover dal punto A al punto B, tenendo in considerazione tutti i vincoli probabili. Per esempio, quale sarebbe il percorso se il rover dovesse raggiungere una posizione specificata con il minimo rischio? In alternativa, se il rover dovesse raggiungere una posizione specificata usando la minima energia, quale sarebbe il percorso?
La prima fase di questo progetto triennale è quella di sviluppare il modello iniziale del rover, inclusi aspetti come la batteria, la generazione solare di energia e le condizioni del terreno e del suolo. Il progetto, nelle sue ultime fasi, includerà anche una gamma completa di step di collaudo Hardware-in-the-Loop (HIL) utilizzando hardware e software real-time di National Instruments, con modelli di sistema sviluppati e implementati automaticamente da MapleSim. Ciò è critico per ottimizzare i parametri di sistema che massimizzeranno la conservazione dell’energia raggiungendo comunque gli scopi della missione.
“Con l’uso di MapleSim, la base del modello matematico del rover è stata sviluppata in un solo mese”, afferma il Dr. Khajepour. “I benefici di MapleSim rispetto ai tool tradizionali sono significativi. Abbiamo ora il modello matematico del rover a 6 ruote senza avere scritto una sola equazione. MapleSim è riuscito a generare automaticamente un set di equazioni ottimale per il sistema rover, cosa essenziale nella fase di ottimizzazione”.
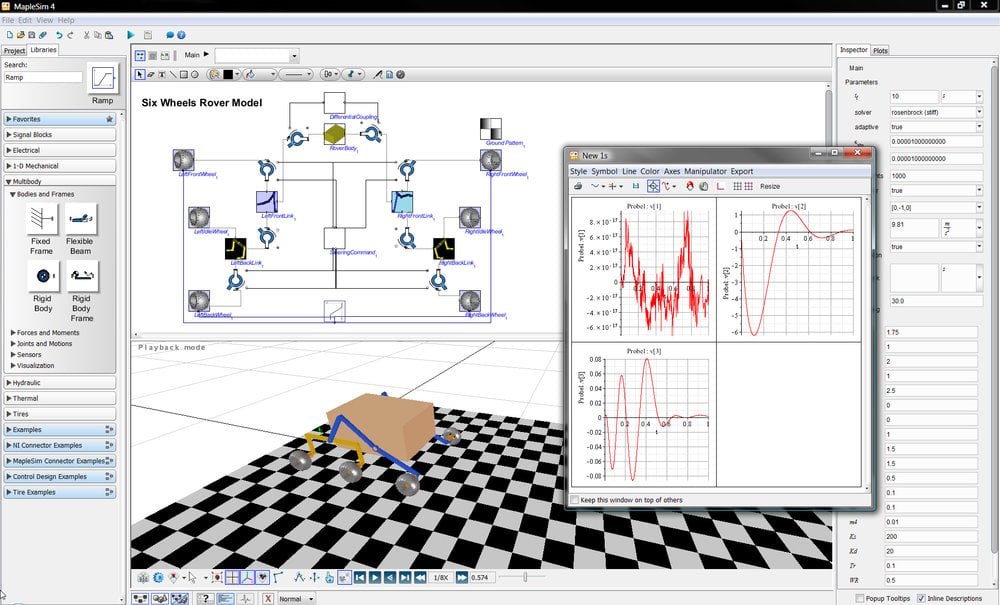
Il Dr. Khajepour è rimasto colpito anche dall’interfaccia grafica di MapleSim. In MapleSim, è possibile ricreare semplicemente il diagramma del sistema sul proprio schermo utilizzando componenti che rappresentano il modello fisico. Il diagramma risultante del sistema ha un aspetto molto simile a quello che un ingegnere potrebbe disegnare a mano. MapleSim può quindi trasformare facilmente i modelli in animazioni realistiche. Tali animazioni rendono sostanzialmente più facile validare il diagramma di sistema e fornire un dettaglio più approfondito del comportamento del sistema.
“La possibilità di vedere il modello e di vedere le parti in movimento, è molto importante per uno sviluppatore di modelli”, afferma il Dr. Khajepour. “Sto passando a MapleSim nella maggior parte dei miei progetti”.
L’obiettivo generale del progetto è progettare un sistema rover in grado di portare il rover dal punto A al punto B, tenendo in considerazione tutti i vincoli probabili. Per esempio, quale sarebbe il percorso se il rover dovesse raggiungere una posizione specificata con il minimo rischio? In alternativa, se il rover dovesse raggiungere una posizione specificata usando la minima energia, quale sarebbe il percorso?
La prima fase di questo progetto triennale è quella di sviluppare il modello iniziale del rover, inclusi aspetti come la batteria, la generazione solare di energia e le condizioni del terreno e del suolo. Il progetto, nelle sue ultime fasi, includerà anche una gamma completa di step di collaudo Hardware-in-the-Loop (HIL) utilizzando hardware e software real-time di National Instruments, con modelli di sistema sviluppati e implementati automaticamente da MapleSim. Ciò è critico per ottimizzare i parametri di sistema che massimizzeranno la conservazione dell’energia raggiungendo comunque gli scopi della missione.
“Con l’uso di MapleSim, la base del modello matematico del rover è stata sviluppata in un solo mese”, afferma il Dr. Khajepour. “I benefici di MapleSim rispetto ai tool tradizionali sono significativi. Abbiamo ora il modello matematico del rover a 6 ruote senza avere scritto una sola equazione. MapleSim è riuscito a generare automaticamente un set di equazioni ottimale per il sistema rover, cosa essenziale nella fase di ottimizzazione”.
Il Dr. Khajepour è rimasto colpito anche dall’interfaccia grafica di MapleSim. In MapleSim, è possibile ricreare semplicemente il diagramma del sistema sul proprio schermo utilizzando componenti che rappresentano il modello fisico. Il diagramma risultante del sistema ha un aspetto molto simile a quello che un ingegnere potrebbe disegnare a mano. MapleSim può quindi trasformare facilmente i modelli in animazioni realistiche. Tali animazioni rendono sostanzialmente più facile validare il diagramma di sistema e fornire un dettaglio più approfondito del comportamento del sistema.
“La possibilità di vedere il modello e di vedere le parti in movimento, è molto importante per uno sviluppatore di modelli”, afferma il Dr. Khajepour. “Sto passando a MapleSim nella maggior parte dei miei progetti”.
Richiedi maggiori informazioni…
