
www.industria-online.com
16
'16
Written on Modified on
Un braccio robotizzato a 7 giunti esegue il 'T'ai Chi Ch'uan'
Nel progetto e nello sviluppo del primo Robot Collaborativo Cinese di Siasun, Cina è stata utilizzata la soluzione multiasse e servo di Elmo
La soluzione Elmo
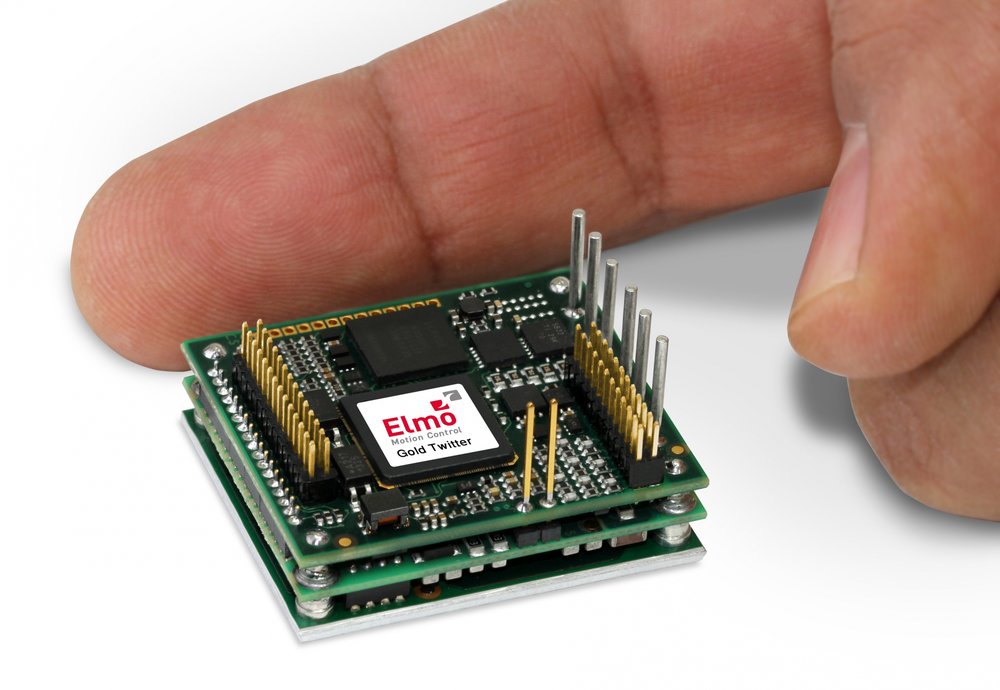
I servo drive
Per questa applicazione impegnativa sono stati selezionati i servodrive ultrapiccoli e potenti Gold EtherCAT di Elmo. I drive sono stati montati direttamente sui giunti del robot e hanno rappresentato una scelta perfetta per mantenere le piccole dimensioni e la compattezza del robot. Due potenti drive ultrapiccoli Gold SOLO GUITAR sono stati utilizzati per azionare i due motori base dei giunti che supportano l’intera struttura meccanica del robot. La possibilità di alimentare i motori con una corrente continua di 50A e un’elevata corrente di picco fino a 100A ha permesso di raggiungere i valori di funzionamento richiesti in termini di alta velocità, accelerazione e decelerazione. Per azionare gli altri cinque giunti del robot sono stati utilizzati cinque ulteriori drive in miniatura Gold SOLO WHISTLE in grado di funzionare con una corrente continua di 20A e una corrente di picco fino a 40A. Ogni drive del sistema funziona ai massimi valori di velocità, accelerazione e decelerazione, ma deve poter funzionare anche a basse velocità con accuratezza e precisione estremamente elevate. Questo funzionamento polarmente opposto con gli stessi drive è reso possibile dall’eccezionale range dinamico della corrente di 1:2000 e dalla risposta a banda molto ampia dei drive. Un drive con un ingombro fisico sufficientemente piccolo che ne permettesse il montaggio diretto sul giunto del robot era l’unica opzione possibile per questo progetto complesso. Il posizionamento dei drive in stretta prossimità del feedback servo si è tradotto in un cablaggio minimo, minime influenze del rumore esterno, basse EMI e RFI e un netto incremento dell’affidabilità globale del sistema.
L’EASII (Elmo Application Studio)
Il tool di configurazione Elmo altamente avanzato ma di semplice uso, l’EASII, (il tool che “fa tutto per te”) ha assistito la messa a punto di ciascuno dei singoli drive nella rete al massimo livello per ottimizzare le prestazioni servo. La System Identification e un opportuno progetto dei controller, utilizzando filtri di ordine elevato per superare le imperfezioni nella struttura meccanica, sono stati solo alcuni dei tool implementati per elevare il sistema alle sue massime prestazioni servo possibili. Inoltre, sono state implementate identificazioni multiasse utilizzando metodi di identificazione semplificati e avanzati con una speciale schedulazione del guadagno di posizione per eliminare gli effetti di crossover fra i vari assi. In questa applicazione sono state utilizzate molte altre caratteristiche, tutte per ottenere il funzionamento del sistema con la massima ampiezza di banda e il tempo di risposta più veloce possibili e, nello stesso tempo, per mantenere la stabilità e il funzionamento regolare del robot con margini elevati.
Platinum Maestro, il Controller Multiasse definitivo
La provata capacità di Elmo di supportare un’ampia gamma di cinematica incorporata nel robot utilizzando il suo controller multiasse avanzato Platinum Maestro (P-MAS), con meccanismi come Cartesiano, SCARA, 3- link, Delta, ecc. facilita la risposta a qualsiasi problema di robotica. Il supporto cinematico incorporato funziona sia in MCS (Sistema di Coordinate della Macchina) sia in PCS (Sistema di Coordinate del Prodotto) con piena sincronizzazione a tavole rotanti, trasportatori e altre apparecchiature esterne. Inoltre, il P-MAS ha una speciale sezione di codice real-time per le applicazioni dell’utente. Questa speciale sezione di codice consente agli sviluppatori di robot di scrivere le loro specifiche equazioni cinematiche del robot, permettendo al P-MAS di supportare senza limitazioni qualsiasi tipo di robot di fascia elevata oggi disponibile, dove gli utenti possono implementare la propria cinematica specifica. Il P-MAS, che si basa su un potente processore 4-Core di ultima generazione, è essenziale in quel tipo di applicazioni che richiedono il calcolo real-time della cinematica del robot e della cinematica inversa entro un tempo ciclo della rete di 250μs. Le equazioni cinematiche implementate nella sezione d’ingresso utente real-time, calcolano le posizioni/velocità o la coppia target di tutti gli assi del sistema e le trasmettono in ogni ciclo EtherCAT. Il funzionamento del robot è diviso in due modi principali; il primo è il modo di apprendimento del funzionamento, il secondo è il modo di lavoro. Nel modo di apprendimento, l’operatore muove fisicamente il robot in punti di posizione chiave lungo la traiettoria del percorso desiderato. Il controller multiasse registra i relativi punti di posizione al fine di ripetere l’intero moto sulla traiettoria nel modo di lavoro. Durante questo modo, i driver funzionano a coppia sincrona ciclica (CST). Oltre al comando di coppia, il controller multiasse eroga una corrente (coppia) di compensazione addizionale per superare fattori di resistenza come la gravità e la dinamica del robot, mantenendo nello stesso tempo un processo di dragging regolare. Uno dei punti salienti di questa soluzione robotica così complessa è la semplicità di implementazione del processo di addestramento per i non programmatori, perché la maggior parte dei task può essere ottenuta senza alcuna esperienza o capacità di programmazione. Il secondo modo di funzionamento è quello di lavoro, dove il controller multiasse calcola le sette posizioni/velocità target in base al modello cinematico del robot (soluzione a cinematica inversa della matrice DH) e, se necessario, la compensazione della coppia in base al modello dinamico viene aggiunta alla coppia d’uscita totale. I driver funzionano nel modo a posizionamento sincrono ciclico (CSP) o nel modo a velocità sincrona ciclica (CSV), ricevendo comandi di posizione/velocità target e comandi di offset della coppia.
Punti salienti della soluzione
- Prestazioni servo imbattibili.
- Tempo ciclo di 250ms per un massimo di 16 assi completamente coordinati e sincronizzati
- Servo drive di piccole dimensioni con altissima potenza nominale montati direttamente sui giunti del robot
- Elevato range di corrente dinamico per alte velocità e alta precisione
- Possibilità di controllo a doppio anello
- Possibilità di comunicazione con una varietà di didpositivi di feedback (encoder incrementali e assoluti)
- Uso di un potente Controller Multiasse per la sincronizzazione e l’implementazione del modo del robot
- Rete deterministica seriale real time EtherCAT veloce
- Prestazioni servo ottimizzate - tempo di risposta molto veloce grazie ad ampiezze di banda estremamente grandi dell’anello di controllo
- Il potente EASII permette la facile configurazione e implementazione del robot
- Maggima efficienza, massima affidabilità
- Ultrarobusti, i drive possono essere montati ovunque.
- Basse EMI e RFI
Conclusione
Le soluzioni servo e motion intelligenti, piccole e semplici di Elmo incrementano le prestazioni e potenziano la funzionalità della tecnologia più recente di Siasun - il robot collaborativo
Richiedi maggiori informazioni…
