
www.industria-online.com
27
'23
Written on Modified on
SIKO sostiene il progetto di raccolta autonoma dei frutteti: introduzione di robot per la raccolta delle mele
Possibilità in espansione: i sistemi di misura ei sensori di SIKO GmbH entrano nel settore agricolo per le macchine mobili.
"AurOrA" (Autonomer Obstplantagenhelfer Altes Land, Ausilio autonomo per i frutteti dell’Altes Land) è un piccolo veicolo semovente che in futuro circolerà autonomamente nei frutteti, individuando e prelevando le casse piene di frutta per poi portarle a un punto di scarico definito. Per il personale addetto alla raccolta, il robot comporterà un alleggerimento delle mansioni e la possibilità di dedicarsi a compiti più impegnativi. Grazie alla tecnologia e all’automazione i frutticultori potranno evitare sempre più le attività monotone e faticose, e ciò faciliterà il loro lavoro. Lo spunto iniziale del progetto deriva dall’esperienza pratica: il frutticoltore Johann Schröder di Jork, nell’area dell’Altes Land a sud-ovest di Amburgo, si è rivolto alla Hochschule 21 di Buxtehude chiedendo supporto per lo sviluppo di un veicolo a funzionamento autonomo. Il progetto è stato avviato nel febbraio 2020 in collaborazione con la PWH, un’azienda di Jork che produce macchine agricole. Poiché i proprietari di frutteti hanno una forte necessità di assistenza tecnica, si prevede che nel medio termine il progetto darà vita a un prodotto commercializzabile ed economicamente vantaggioso. Scopo effettivo del progetto è tuttavia quello di realizzare entro il mese di gennaio 2023 un prototipo funzionante per dimostrarne la fattibilità tecnica. Il progetto è finanziato dal programma di sostegno ZIM del Ministero dell’Economia tedesco.
Secondo traguardo: il robot si muove in autonomia
Il progetto si trova attualmente nella terza fase di pianificazione dopo aver raggiunto il secondo traguardo: il robot può già muoversi con ampia autonomia nel frutteto. Ora si sta lavorando sul fronte della prevenzione delle collisioni e del riconoscimento del terreno, ad esempio quello fangoso, per evitare che le ruote girino su se stesse e che il veicolo rimanga bloccato o venga deviato in un fosso. Il terzo traguardo consisterà nell’effettivo prelievo e successivo trasporto della cassa di frutta.
Questo tipo di progetto di sviluppo cela sempre delle sfide particolari che vanno dal coordinamento degli interessi delle varie aziende frutticole, che hanno spesso procedure di raccolta molto diverse tra loro, a problemi infrastrutturali come uno standard stabile di telefonia mobile che consenta al robot di ricevere dati GPS e comunicare con l'operatore, fino alle difficoltà pratiche insite nelle attività quotidiane all'aperto (maltempo, neve, pioggia, luce solare, caratteristiche del terreno).
SIKO sostiene progetti pioneristici
Un veicolo dotato di autonomia operativa necessita di sensori che provvedano a svariate mansioni di misurazione. Per la rilevazione dell’angolo di sterzata e della posizione del caricatore si è fatto ricorso allo specialista di misure e sensori SIKO. Grazie alla sua pluriennale esperienza nel settore delle macchine mobili e della tecnologia applicata alle macchine agricole, SIKO ha potuto contribuire con le proprie competenze alla fase di progettazione e ha poi fornito due tipi di encoder atti a supportare le suddette importanti funzioni. Alexander Kammann, collaboratore scientifico della Hochschule 21, esprime apprezzamento per l’opera degli esperti SIKO: "Siamo rimasti positivamente sorpresi dalla disponibilità con cui SIKO promuove progetti pioneristici e dall’impegno che ha profuso nell’attività di consulenza. All'inizio non sapevamo affatto quali fossero effettivamente gli esatti requisiti dei sensori: li abbiamo elaborati e definiti insieme”.
Encoder robusti per condizioni ambientali impegnative
I possibili sensori devono essere innanzi tutto molto robusti e insensibili alle aspre condizioni ambientali outdoor (fango, polvere, pioggia, forte irradiazione solare, irregolarità del terreno). I componenti del sistema modulare di sensori PURE.MOBILE di SIKO sono particolarmente adatti all’impiego in macchine mobili operanti in condizioni ambientali avverse. Nella parte posteriore del veicolo è installata una doppia ruota che può girare e genera in tal modo la sterzata. L'angolo di sterzata viene rilevato dall'encoder magnetico WV5800M e poi elaborato e inviato al sistema di controllo. L’encoder in questione è un encoder multigiro capace di rilevare in modo assoluto anche più rotazioni. Qualora la tensione subisse un’interruzione, ad esempio a causa delle batterie scariche, l'angolo di sterzata precedentemente impostato non andrebbe perduto. Senza encoder assoluto, all’atto del riavvio del veicolo l’angolo di sterzata sarebbe erroneamente definito come un angolo di zero gradi. Il sistema magnetico di misurazione è conforme ai requisiti di robustezza e insensibilità. Il team di progetto ha apprezzato anche l'elevata precisione e affidabilità dell’encoder grazie al quale il veicolo adegua sempre l'angolo di sterzata in modo tale da poter effettuare il percorso definito senza che si verifichino anomalie e senza eccessive tolleranze. Per conseguire un livello di sicurezza ancora maggiore anche nell'interazione con le persone che lavorano nei frutteti, e per escludere in modo affidabile eventuali guasti, nei veicoli futuri sarà impiegata la variante di sicurezza dell'encoder WV58MR con rilevamento ridondante della posizione. Nella fase di sviluppo l'attenzione si concentrava anzitutto sulla fattibilità tecnica ed era quindi sufficiente l'encoder senza standard di sicurezza. La marcia in più dei modelli SIKO: i due encoder hanno una struttura identica e in caso di sostituzione non richiedono quindi nessuna modifica meccanica dell'applicazione. Per il rilevamento dell'angolo di sterzata è stata inoltre adottata un'interfaccia CANopen che consente di utilizzare il maggior numero possibile di componenti elettronici standardizzati, velocemente sostituibili e integrabili nel sistema bus.
Sensori di posizione per i “flipper”
Il secondo encoder SIKO AH25S è ancora più piccolo e compatto, ma non per questo meno robusto. Si tratta di un encoder monogiro che controlla la posizione dei caricatori delle casse, i cosiddetti flipper. La cassa piena di frutta viene sollevata facendo presa in quattro punti ad opera di altrettanti flipper. Quando il robot passa sopra la cassa, questa sfiora i flipper caricati a molla i quali oscillano lateralmente e poi si ripiegano automaticamente, andando a trovarsi sotto i quattro angoli della cassa da prelevare. Per un trasporto sicuro delle casse è necessario conoscere la posizione dei singoli flipper: si sono effettivamente spostati all’indietro o forse si sono bloccati? Tutti e quattro i flipper si trovano al di sotto della cassa per garantirne il sollevamento? Lo spazio di installazione molto limitato ha reso necessario un encoder miniaturizzato che potesse essere utilizzato direttamente in loco senza bisogno di uno speciale supporto. In questo caso è sufficiente un encoder analogico in quanto le informazioni sui dati sono meno critiche rispetto a quelle del sensore dell'angolo di sterzata.
Un ausilio per il raccolto con un reale valore aggiunto
In un progetto di sviluppo di questo tipo è necessario che molti piccoli ingranaggi si innestino l’uno nell’altro per trasformare un'idea vaga in un prodotto tecnicamente impeccabile che, in prospettiva futura, sia utilizzabile in numerosi frutteti con un rapporto costi-benefici equilibrato. Per poter offrire alle aziende agricole un reale valore aggiunto, è allo studio l’impiego di "AurOrA" anche per ulteriori mansioni quali la pacciamatura e la falciatura o come supporto per la ripiantumazione di alberi. Ciò ne consentirebbe un utilizzo efficiente lungo quasi tutto l’arco dell’anno e non limitato alla sola stagione del raccolto.
Immagini:

Fig. 0) “AurOra”, il robot semovente e intelligente per la raccolta della frutta. Fonte: ©hochschule 21

Fig. 1) In futuro AurOra aiuterà nella raccolta della frutta circolando autonomamente nei frutteti, individuando e prelevando le casse piene di frutta e portandole a un punto di scarico definito. Fonte: ©hochschule 21

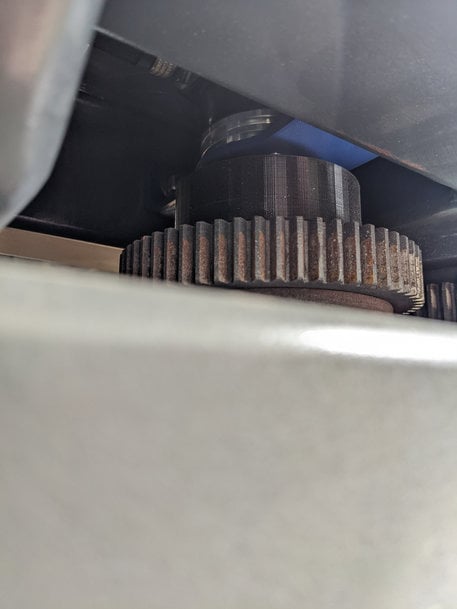
Fig. 2) e 3) Importante dettaglio dello sterzo: l’encoder multigiro WV5800M rileva l’angolo di sterzata affinché il veicolo possa effettuare il percorso stabilito. Fonte: ©hochschule 21
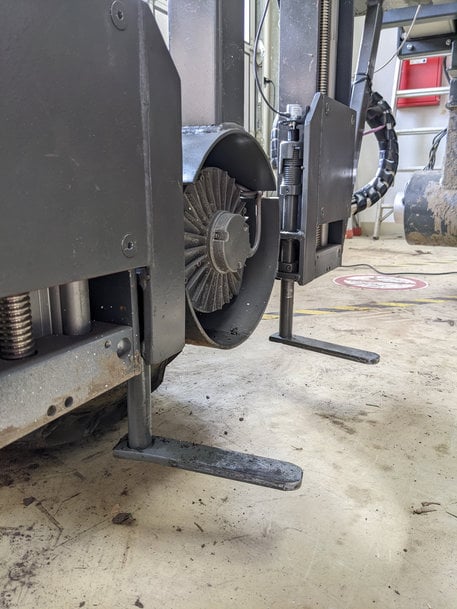
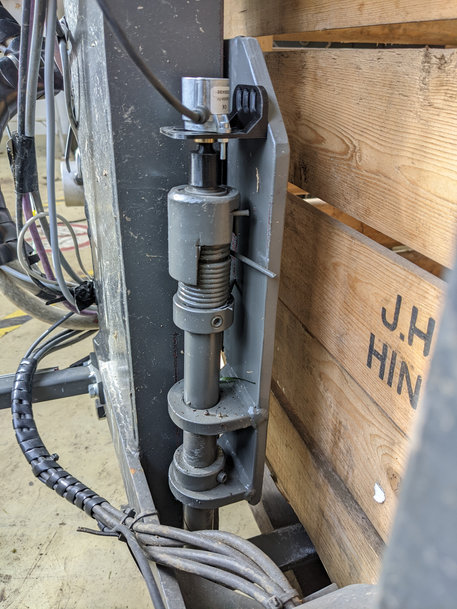
Fig. 4) e 5) Il robusto encoder miniaturizzato AH25S rileva la posizione dei caricatori di casse, i cosiddetti “flipper”. L’encoder si trova all’estremità superiore della struttura. Fonte: ©hochschule 21

Fig. 6) Gli encoder AH25S, WV5800M e WV58MR descritti nell’articolo. Fonte: ©SIKO GmbH

Fig. 7) Dott. Alexander Kamman, collaboratore scientifico della Hochschule 21. Fonte: ©hochschule 21
Richiedi maggiori informazioni…
