
www.industria-online.com
02
'14
Written on Modified on
Centralizzata o decentralizzata? Quale tipo di architettura offre i migliori vantaggi tecnici e commerciali?
Decentralizzare la tecnologia degli asservimenti può portare risparmi nella costruzione di macchine e impianti durante l’installazione. Due ulteriori vantaggi includono carichi termici ridotti negli armadi e un’architettura di azionamento più diretta. Sorge tuttavia la questione di quale sia la tecnologia migliore: una soluzione con motore/azionamento integrati o con motore e azionamento separati?
Molto spesso, nella vita la risposta a una domanda non è né A né B, ma C. Ciò vale anche nella discussione per determinare il sistema migliore fra la tecnologia degli asservimenti decentralizzati o centralizzati. Qual è l’architettura migliore da un punto di vista tecnico e commerciale per una particolare applicazione? Invece di A o B, si ottiene la risposta C attraverso architetture miste, una coesistenza di entrambi i tipi. In questo caso, quando gli azionamenti hanno un numero elevato di caratteristiche in comune, i due approcci possono essere facilmente combinati. Pertanto, la standardizzazione di queste piattaforme è l’approccio migliore.
L’architettura centralizzata
Al contrario del convogliamento orizzontale, dove si vedono comunemente servoazionamenti decentralizzati, i servoazionamenti collocati centralmente dominano ancora il mercato del motion control a elevata dinamica e precisione. I servoazionamenti, con altri componenti di controllo, a volte con un IPC completo, risiedono insieme in un armadio di controllo protetto contro il mondo esterno. Il collegamento al motore utilizza una struttura a stella, con singoli cavi di controllo e potenza. Poiché la perdita termica è generata centralmente, nell’armadio è richiesto un efficace condizionamento dell’aria.
L’alternativa decentralizzata
La tecnologia dei servoazionamenti decentralizzati segue il principio base dello spostamento del controllo dei singoli motori dall’armadio di controllo centrale, portandolo strettamente vicino al processo. Questa architettura rende necessario un progetto robusto che fornisca un elevato grado di protezione ambientale. Il vantaggio risiede in particolare nel cablaggio dei motori. Due altri vantaggi sono il migliore comportamento EMC e l’ampia distribuzione delle perdite termiche, riducendo il costo o la necessità di un sistema di controllo centralizzato della climatizzazione nell’armadio.
Tendenze nel settore della costruzione di macchine
Soprattutto nei macchinari per il confezionamento e nelle macchine per il settore del food and beverage, la tendenza è quella di abbandonare le pareti di armadi lunghe più metri installando invece piccole unità altamente autoprotette all’interno della struttura della macchina. La tendenza progressiva va verso la modularizzazione delle strutture di produzione che rendono necessaria la distribuzione o combinazione delle funzioni. Questa affermazione è rafforzata dal fatto che le apparecchiature di produzione consistono di un processo principale e task ausiliari. Questi ultimi sono gestiti da una varietà di moduli compatibili - per esempio sistemi convogliatori, selezionatori e unità di manipolazione. Ciò offre un percorso per la facile espansione della macchina. Contro questo sfondo, l’esperienza pratica dimostra che una struttura decentralizzata è vantaggiosa, soprattutto con singoli assi spazialmente distribuiti. Al contrario, moduli macchina per assi sincronizzati fisicamente vicini fra loro e azionamenti situati centralmente in un armadio sono generalmente considerati la struttura preferita.
Risparmi economici nell’installazione e nel montaggio
Il potenziale di risparmio della tecnologia decentralizzata può essere chiaramente dimostrato sulla base di una macchina reale di formatura del metallo con otto assi. Il primo asse è situato a 5 metri di distanza dall’armadio di controllo, mentre ogni asse addizionale è situato 3 metri più in là. Un sistema di controllo centralizzato sarebbe caratterizzato da un armadio di controllo centrale contenente gli azionamenti, nel quale ogni motore avrebbe cavi schermati di potenza e feedback separati, per un totale di 248 metri di cavi.
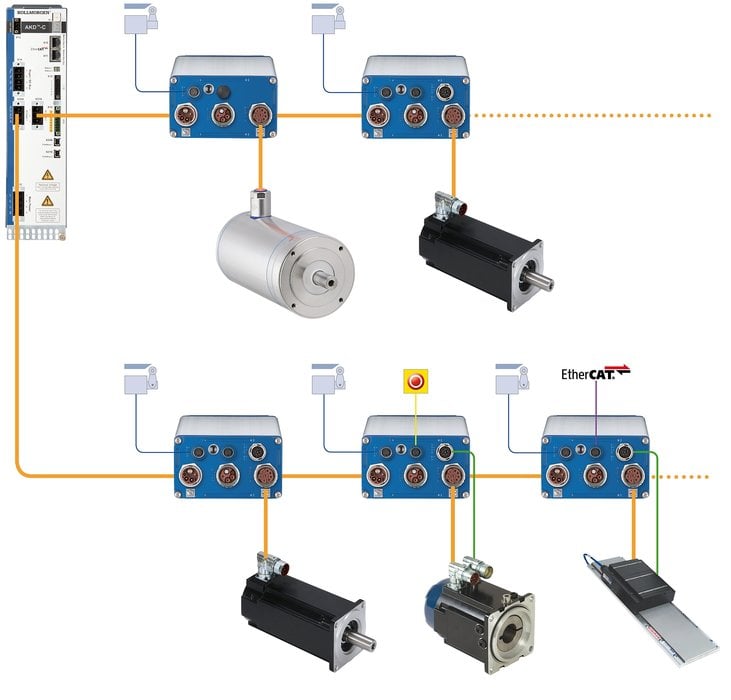
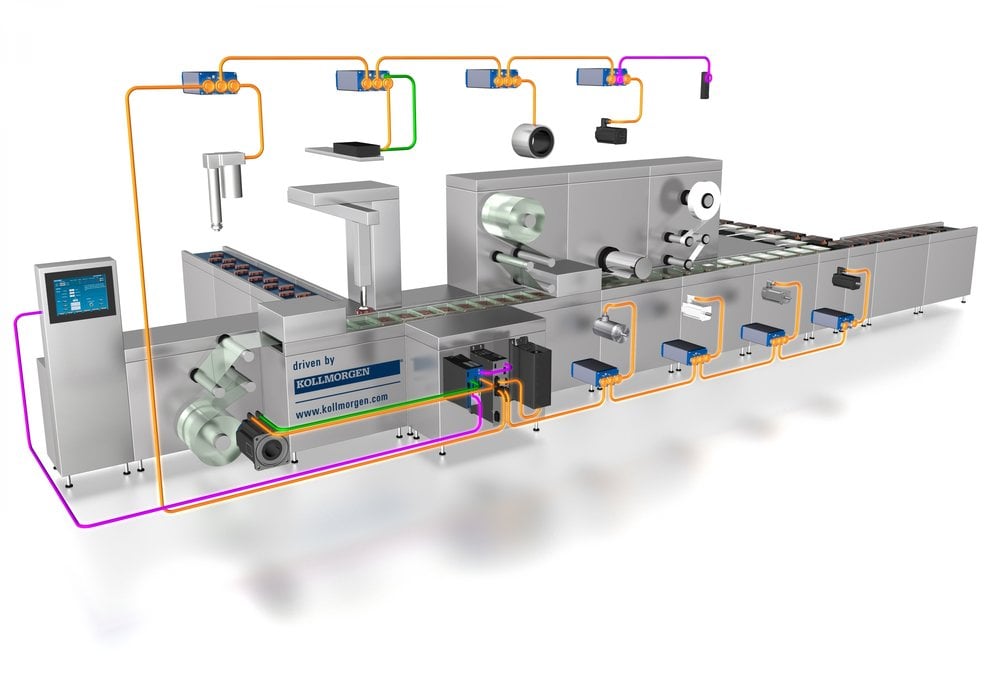
Immagine: Il layout è un’architettura di servoazionamento distribuita con servoazionamenti AKD-N, tipi di motori differenti e tecnologia di collegamento a cavo singolo.

Una combinazione di un singolo modulo di alimentazione AKD-C KOLLMORGEN e di 8 servocontrollori decentralizzati AKD-N ridurrebbe invece il cablaggio necessario a 34 metri. Il calcolo: un singolo cavo ibrido di 5 metri che fornisce l’alimentazione e il fieldbus per il controllo degli assi è collegato fra il modulo di alimentazione e il primo controllore decentralizzato. Un singolo cavo ibrido lungo 3 metri collega ogni azionamento addizionale per un totale di 21 metri. Poiché supponiamo che ogni motore sia situato a 1 metro di distanza da ogni azionamento decentralizzato AKD-N e KOLLMORGEN offre una tecnologia di collegamento dei motori a un solo cavo, sono richiesti solo 8 metri di cavo addizionali. Complessivamente, il sistema decentralizzato ha ridotto il cablaggio richiesto da 248 a 34 metri, un risparmio dell’86 per cento. Queste cifre danno un’idea dei guadagni economici complessivi per l’OEM, inclusi i costi dei cavi e la riduzione del lavoro di assemblaggio. Quando gli assi richiedono I/O addizionali, la riduzione del cablaggio è ancora più evidente. Invece di 372 metri, sono necessari solo 42 metri, pari a un risparmio dell’89 per cento.
Un altro beneficio della riallocazione degli azionamenti è la riduzione della potenza dissipata nell’armadio di controllo. Ciò riduce effettivamente le esigenze di condizionamento dell’aria, offrendo quindi risparmi diretti sia all’OEM, sia all’utente finale. Di conseguenza, è possibile ridurre le dimensioni o eliminare completamente i condizionatori d’aria dell’armadio di controllo, riducendo i costi hardware e le relative operazioni e, in ultima analisi, migliorando l’efficienza energetica.
Vantaggi tecnici ottenuti diminuendo la complessità
La serie di azionamenti AKD -N KOLLMORGEN offre un grado di protezione IP67 e la connessione attraverso un cavo ibrido con diametro di undici millimetri al modulo di alimentazione centrale nell’armadio di controllo. Questo singolo cavo fornisce potenza e comunicazioni senza richiedere cablaggio addizionale. Ogni modulo di alimentazione AKD -C può supportare due stringhe di azionamenti AKD –N, ciascuno con una potenza massima di 4 kW, e possono esservi fino a 8 azionamenti AKD -N per stringa. L’arresto di sicurezza Torque Off eseguito tramite il cavo ibrido è previsto di serie e può essere implementato per ogni azionamento individualmente o in gruppo. Inoltre, è necessario un solo cavo fra il servocontrollore distribuito e il suo motore collegato grazie a una nuova tecnologia a cavo singolo. Non sono più richiesti due cavi per fornire potenza al motore e feedback. Nelle applicazioni di movimentazione dei materiali, dove è richiesto un movimento preciso, spesso per i cavi motore e di feedback sono necessari vassoi portacavo o catene separate. Questa esigenza è ora ridotta perché il cablaggio è molto minore.
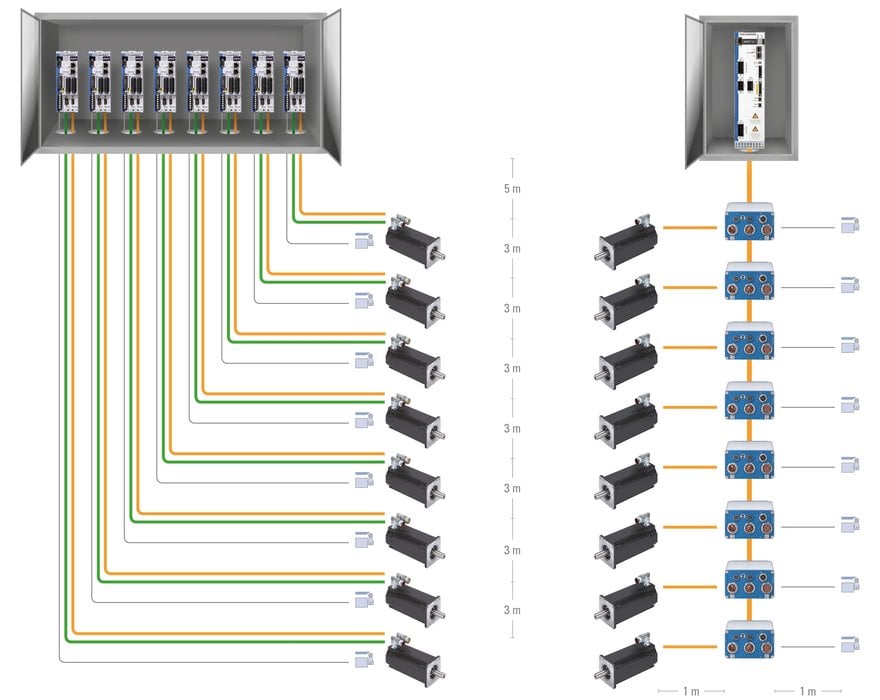
Immagine: E’ vero che a prima vista si tratta di semplici cavi, ma essi spingono verso l’alto i costi di installazione e occupano spazio all’interno delle macchine. Il confronto fra il layout centralizzato e quello distribuito è autoesplicativo.

Immagine: I motori coppia della serie KBM rivelano la loro forza piena quando nelle macchine c’è veramente poco spazio. Questi vantaggi si combinano molto bene con i servoazionamenti decentralizzati AKD-N.
Una soluzione vincente con maggiore libertà di progettazione
Calcoli campione mostrano che la tecnologia servo decentralizzata permette di risparmiare spazio in combinazione con la tecnologia di collegamento a cavo singolo fra motore e controllore. Questo beneficio si traduce in vassoi portacavo più piccoli, in catene più leggere e in una maggiore compattezza, offrendo una maggiore libertà di progettazione nello sviluppo di nuove macchine. Tale libertà nasce principalmente dal fatto che la tecnologia distribuita estende le possibilità di modularizzazione rispetto a un progetto con controllo centralizzato, che non è flessibile. La linea di demarcazione è che questo permette ai nuovi impianti OEM di creare nuove macchine da moduli già sviluppati, rendendo più efficiente l’ingegnerizzazione.
Tecnologia distributa come ibrido
Un secondo modo per decentralizzare è quello di usare una soluzione integrata ibrida. Si tratta di unità motore e servocontrollore combinate senza la necessità di un cablaggio esterno. La cosiddetta soluzione ‘piggyback’ ha lo svantaggio di un declassamento dell’azionamento all’aumentare della temperatura ambiente. Più questa è elevata, maggiore è la riduzione di prestazioni che è necessaria perché l’azionamento di autoprotegga contro il surriscaldamento. Questa relazione fa sì in pratica che i motori debbano essere più grossi di quanto altrimenti sarebbe necessario per offrire le prestazioni richieste entro limiti di temperatura accettabili per l’elettronica. Tipici task dei servo come la rapida accelerazione e decelerazione durante il posizionamento possono essere particolarmente difficili nella progettazione di soluzioni ibride a causa del problema di efficace dissipazione del calore.

Immagine: Più ordine nella massa di cavi: se si utilizzano servoazionamenti accanto ai motori, si può fare a meno dell’elaborato cablaggio di potenza da un armadio di controllo centrale. L’installazione diventa più chiara.
Tuttavia, la separazione del motore e dell’azionamento in questo punto previene il declassamento intrinseco nella progettazione. Questa soluzione offre la base per motori più piccoli in combinazione con una maggiore efficienza energetica. Inoltre, le combinazioni integrate sono normalmente focalizzate su un singolo tipo di motore, limitando la flessibilità di progettazione della macchina. Al contrario, qualsiasi tipo di motore brushless KOLLMORGEN può essere collegato al servoazionamento decentralizzato AKD-N. Questi motori includono azionamenti diretti rotativi e lineari convenzionali o ad azionamento diretto, offrendo una vera libertà di progettazione e prestazioni ottimali.
Un esempio di integrazione
In conclusione, per chiarire queste relazioni, verrà illustrato un esempio di tecnologia di servoazionamento per una macchina di processo alimentare. Il processo inizia con il taglio di salsiccia e formaggio da parte di un’affettatrice. Il prodotto viene convogliato tramite nastro. Il processo non è una semplice questione di trasportare una pila di salsiccia dal punto A a B, ma di trasportare fette ben definite. La necessità di un Sistema di posizionamento monoasse altamente dinamico è chiara. Nasce ora la questione di quanto integrare le sofisticate funzioni di motion control richieste mantenendo nello stesso tempo un controllo centralizzato della macchina. L’affettatrice offre un buon esempio, perché rappresenta uno specifico asse decentralizzato, in quanto i suoi elevati requisiti di potenza non possono essere soddisfatti con un azionamento decentralizzato. L’obiettivo primario dal punto di vista della costruzione è armonizzare requisiti funzionali altamente diversi fra loro per un’ampia combinazione di soluzioni centralizzate e decentralizzate. L’azionamento AKD-N KOLLMORGEN si focalizza deliberatamente sull’uso di una piattaforma AKD centralizzata. Essa offre la tecnologia appropriate per permettere la selezione ottimale di una soluzione di motion per il task prestazionale richiesto, offerta attraverso l’ampia varietà di attuatori compatibili.
.

Autore:
Dr. Arne Linder, Product Management,
KOLLMORGEN, Ratingen
Richiedi maggiori informazioni…
